
美科学家打造出一款可变形新型软体机器人
大多数机器人都是为某一特定工作而设计的,且适应性不强。但弗吉尼亚理工大学的工程师们现在已经开发出一种软体机器人,它可以变形为一系列的形状,如无人机或游泳机器人等,而这要归功于一种新材料,它可以在液体和固体形式之间轻松转换。该团队的工作已发表在 Science Robotics上。


大多数机器人都是为某一特定工作而设计的,且适应性不强。但弗吉尼亚理工大学的工程师们现在已经开发出一种软体机器人,它可以变形为一系列的形状,如无人机或游泳机器人等,而这要归功于一种新材料,它可以在液体和固体形式之间轻松转换。该团队的工作已发表在 Science Robotics上。
软体机器人由称为“弹性体”(具有高粘度和弹性的材料)的材料制成,软体机器人可以更好地吸收冲击,可以更好地适应环境,并且与传统机器人相比更安全。软体机器人有广泛的应用,包括医学手术、操作和可穿戴技术。然而,这些软体机器人中的许多都依赖于流体系统,这些系统仍然使用由机械部件(电机和轴承)操作的泵。它们仍然沉重而嘈杂。
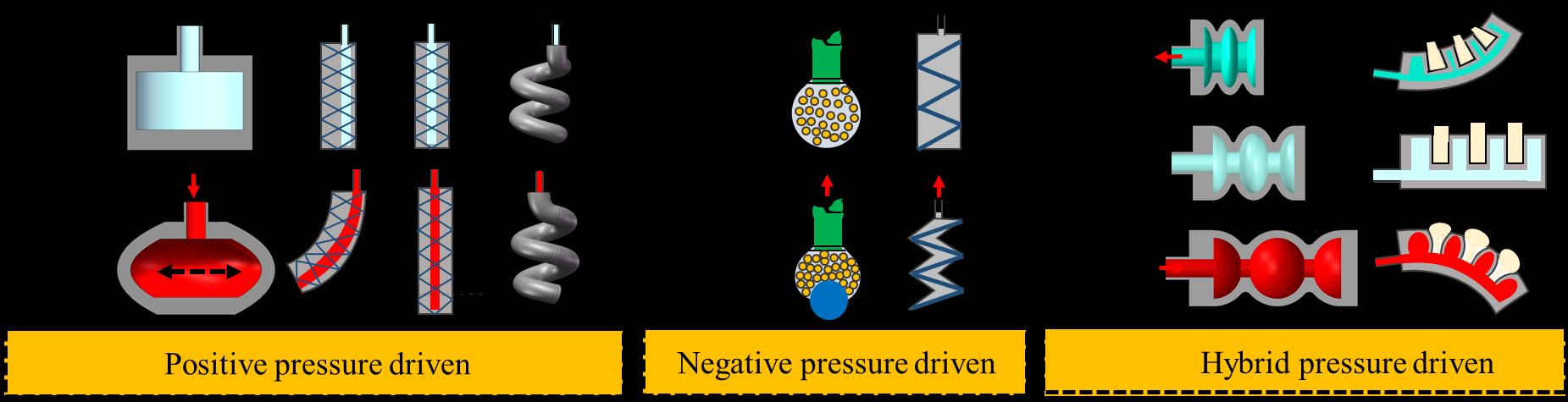
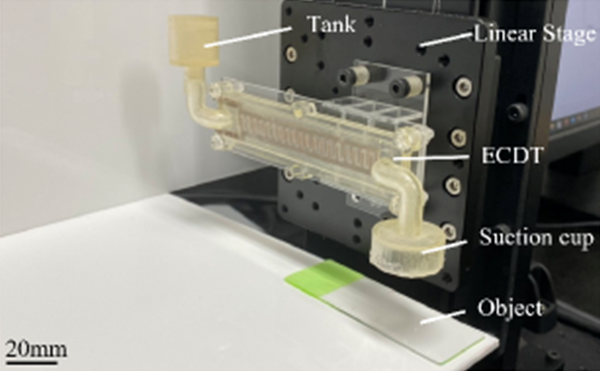
近日,清华大学医学院生物医学工程系国家特聘专家廖洪恩教授课题组在气动软体机器人领域获得重要进展。课题组提出的气动驱动与控制系统具有“正负压一体化”和“可控充放气”的独特优势,可作为通用的气动平台,适用于研究中普遍的气动软体机器人的多种气压需求和精细气压控制。
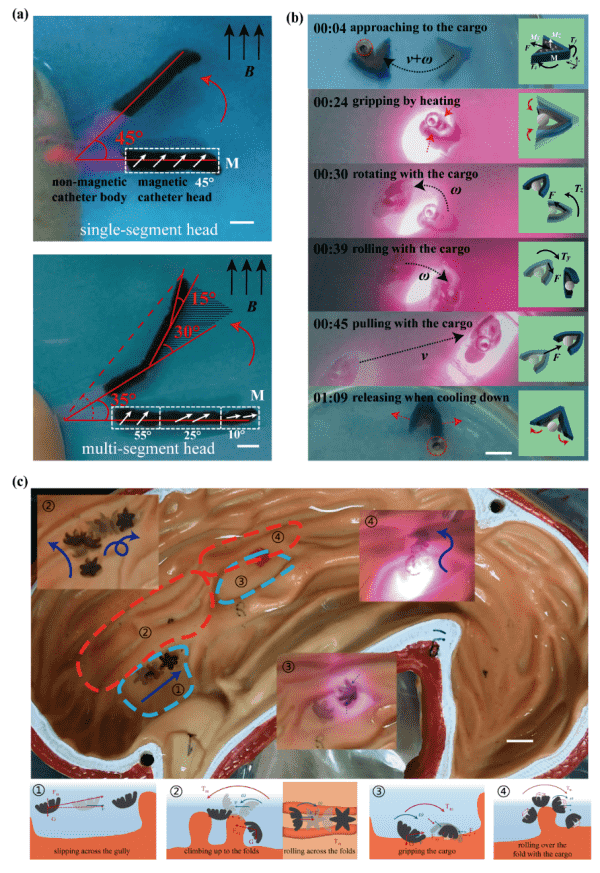
近日,中国科学院沈阳自动化研究所机器人学国家重点实验室微纳米自动化课题组在磁热联合驱动的微型软体机器人研究中取得新进展。科研人员利用4D打印技术制备的软体机器人在近红外光和磁场的联合驱动下,展示了弯曲形变、夹取及搬运功能,在微结构搬运、药物控释等方面展现出重要的应用前景。相关研究成果发表在Composites Part B-Engineering上。

随着科技的不断进步,机器人在人类社会中扮演着越来越重要的角色,其足迹从工农业生产、交通运输、航空航天等领域,逐渐延伸到医疗、教育、服务、生活、娱乐等更贴近人类生活的新领域。人机交互的复杂性和高频性也对机器人结构的灵活性、顺应性以及安全性提出了更高的要求。软体机器人的出现和快速发展则为人机交互和复杂特种环境下传统刚性机器人难以克服的安全性和灵活性等问题的解决带来了曙光。
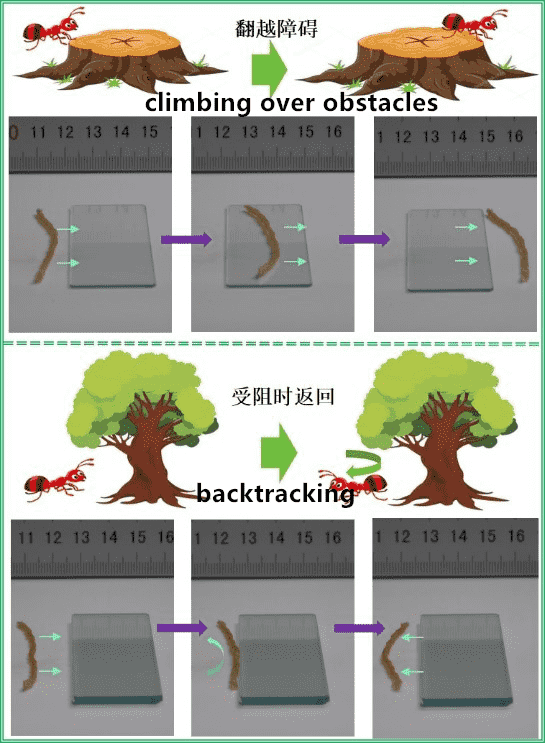
天津大学封伟教授团队近日研发了一种具备自主行动能力和触觉应变的4D打印软体机器人,该机器人在一次打印成型后即具有热致无约束滚动能力,无需其他后续加工程序。该研究成果已在国际著名期刊《物质》上发表。

哈佛大学约翰·保尔森工程与应用科学学院(SEAS)的研究人员开发出电动软阀来控制液压软执行器,这些阀门可用于辅助和治疗设备、仿生软体机器人、柔性抓手、手术机器人等。

根据环境实时变化的“人造伪装”一直很难实现,但据英国《自然·通讯》杂志10日发表的一篇机器人最新研究,韩国科学家团队报告了一个以变色龙为灵感的软体机器人,该机器人能根据背景实时变色。这项研究标志着可穿戴伪装技术的巨大飞跃,同时对下一代技术具有启示意义。

丰田研究院(TRI)通过共享设计源文件和其创新的家用机器人臂的完整制造说明,来帮助加速软体机器人领域。今天,任何研究机构或机器人专家都可以访问punyo.tech并建立自己的Punyo Soft Bubble Gripper。
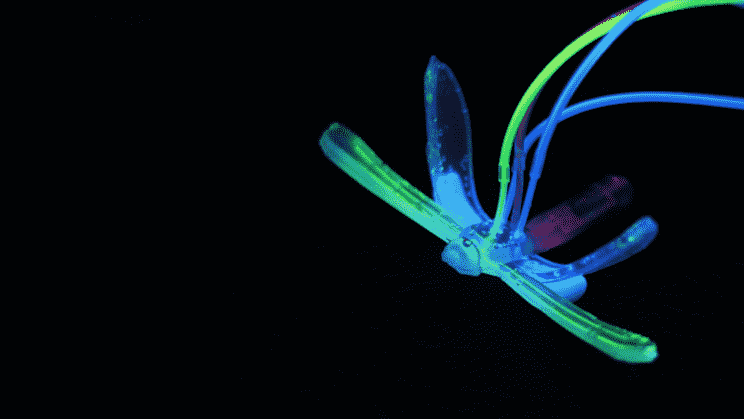
杜克大学的工程师们开发出了一种无电子装置的自主软体机器人,形状像一只蜻蜓。该机器人被称为DraBot,它能在水中掠过,以发出环境变化的信号,如pH值上升、温度或石油泄漏。
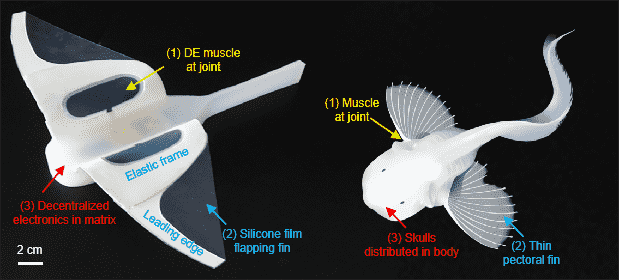
成功“打卡”马里亚纳海沟,浙大仿生软体智能机器鱼研究登《自然》封面。浙大率先提出机电系统软-硬共融的压力适应原理,成功研制了无需耐压外壳的仿生软体智能机器人,首次实现了在万米深海自带能源软体人工肌肉驱控和软体机器人深海自主游动。

在日本的养老和护理一线,劳动力的减少正成为问题。在此背景下,代替人类从事工作的机器人的开发正在推进。由于设想在确保安全性的同时与人类合作,因此机器人的表面有必要采用柔软且能感知接触、起传感器作用的人工皮肤。

据首尔国立大学网站上的一篇文章称,研究人员开发了一种新型机器人–名为离子蜘蛛网,它借鉴了蜘蛛织网的方式。作为软体机器人领域的新秀,在创造全功能人工蜘蛛网的成功应用方面取得的进展,必将成为未来进军这一困难领域的标志性框架。
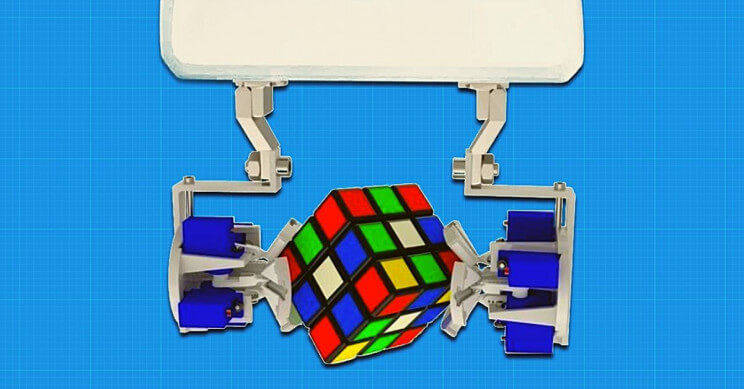
研究人员已经开发出一种新的机器人指尖,能够在三种独特的配置中改变形状 – 使其能够抓住和抬起广泛的奇形物体,根据在预印本网站上分享的一篇论文中概述的一项最新研究,该研究成果在2020年IEEE自动化科学国际会议上发表。

欧洲科学家团队报告研发一种磁驱动的新型高速软体机器人。这种机器人可以超快速地完成行走、游泳、漂浮和捕捉活体苍蝇,将在生物组织工程与生物力学领域得到广泛应用。

功能类似于人手的医疗机械手将使医生能够远程治疗全球各种疾病的患者。但是,当前可用的技术仍无法替代人的触觉。现在休斯敦大学研究人员已经设计并生产出了一种智能电子皮肤和医疗机械手,这种机械手使用新发明的具有高载流子迁移率的橡胶半导体评估重要的诊断数据。
近日,德国马克斯·普朗克智能系统研究所和美国宾夕法尼亚州立大学的科学家联合研发一种生物合成蛋白材料,通过强化串联重复多肽的愈合性能,成功解决了自修复软材料目前的局限性。该研究有望在软机器人领域获得重要应用,相关成果发表在近日的《自然材料》杂志上。
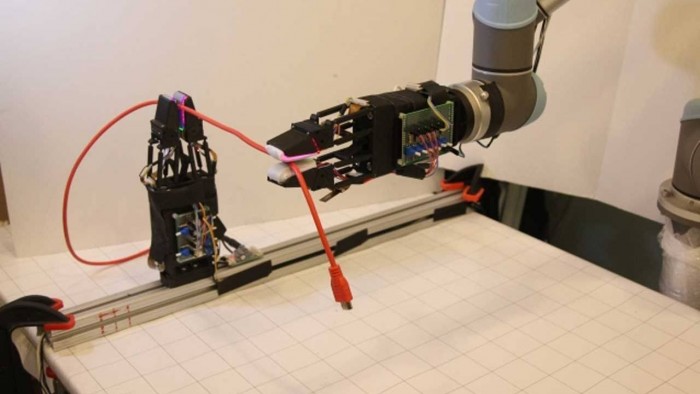
对人类来说,最具挑战性的东西之一是绳子、电线或电缆等物品。这些薄而灵活的物体对于机器人来说更是难以驾驭,大多数机器人抓手根本无法处理它们。麻省理工学院的研究人员现在已经创造出了一种机器人抓手,能够更近距离地模仿人类处理这类柔性物体的方式。
北卡罗来纳州立大学和天普大学的工程师受水母启发开发新型软体机器人,可以胜过现实生活中同类机器人。新型水母机器人强调利用预应力聚合物使软体机器人更加强大的技术。
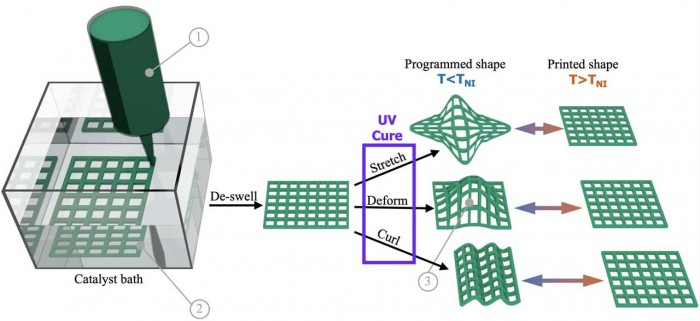
世界各地大学的研究人员一直在研究可以根据需求重新配置自己的软体机器人和医疗植入物。由于莱斯大学布朗工程学院的研究人员的努力,这种变形材料离现实更近了。科学家们开发出了一种打印物体的方法,当暴露在温度变化、电流或者压力下,这些物体可以被操纵成其他形式。

