

在当今科技飞速发展的时代,智能机器人技术作为前沿科技的代表,正日益受到全球科研机构和企业的关注。其中,软体可穿戴机器人作为一种创新的机器人形态,其轻便、灵活的特点使得它在辅助人类日常生活、医疗康复等领域展现出了巨大的潜力。然而,长期以来,软体可穿戴机器人在实现高力量与便携性兼具方面一直面临着技术瓶颈。近日,一项新研究成果为这一领域带来了突破性的解决方案。

近日,上海交大机械与动力工程学院张文明教授团队与同济大学航空航天与力学学院李汶柏研究员合作研究,在Science Advances上发表文章“Encoded sewing soft textile robots”,首次提出了一种基于“编码缝制约束力学”的气动织物软机器设计和制造的新方法,解决了可编程气动软体机器人在高效定制化开发过程中长期存在的挑战,通过简单高效的二维平面缝制工艺,实现了气动织物软机器的复杂时空编码和物理智能,为加速气动织物软机器服务于安全人机交互、定制化穿戴和医疗康复设备的原型开发和产品迭代提供了有效途径。
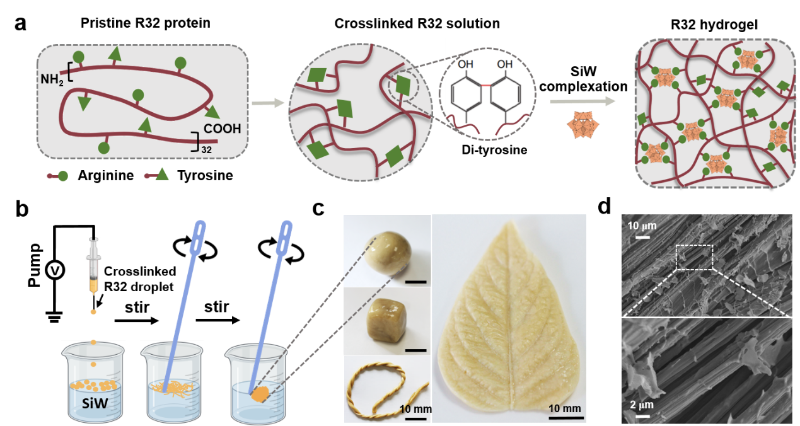
近日,上海交通大学生命科学技术学院、微生物代谢国家重点实验室研究团队率先创制了可编程驱动的蛋白质水下软体机器人,相关研究成果以“Programmable adhesion and morphing of protein hydrogels for underwater robots”为题发表于Nature Communications期刊。上海交通大学博士黄盛晨为第一作者,研究员钱志刚和教授夏小霞为共同通讯作者。
韩国科学技术研究院(KIST)和韩国科学技术院(KAIST)的研究人员已经开发出一种重量为130克的软体机器人夹爪,可以举起重达100公斤的物体。
美国北卡罗来纳州立大学的研究人员最近开发了一种名为“无脑”的软体机器人,它可以在复杂和动态的环境中自主导航,而无需人类或计算机的指导。这种软机器人的独特之处在于,它利用物理智能,而不是依赖计算机编程或人类遥控。
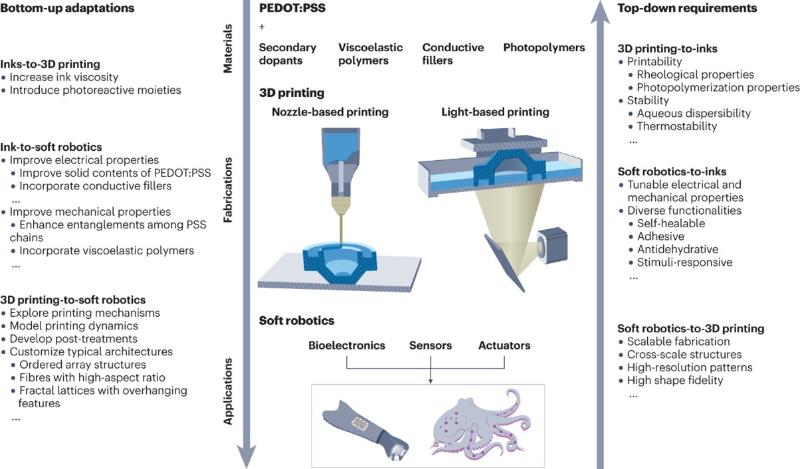
近日,上海交通大学机械与动力工程学院谷国迎教授团队在Nature Reviews Materials上发表“3D-printed PEDOT:PSS for soft robotics”综述文章,针对3D打印技术制造PEDOT:PSS导电聚合物材料应用于软体机器人领域进行了系统分析与前瞻展望。

工程师们受到蠕虫、蛇和水母独特的运动方式的启发,开发出新一代软体水下机器人。现在,机器人专家们创建了一种新的机器人,可以像水母一样游泳,并从海底收集废弃物。
加拿大滑铁卢大学科研人员主导开发了一种新型软体机器人,可利用紫外线和磁力在任意表面上移动,甚至可以爬上墙壁和穿过天花板。这种机器人无需外接电源,可实现远程操作和多功能性,适用于外科手术和搜索人难以到达的地方等场景。
意大利理工学院的研究人员创造出一种受蚯蚓启发的软体机器人,可用于未来地下探索。研究人员开发出一种蠕动软致动器(PSA),可以实现蚯蚓的拮抗肌肉运动;从中间位置开始,当空气被泵入时它会伸长,当空气被抽出时它会压缩。
加拿大滑铁卢大学的研究人员开发出一种名为 GeiwBot 的软体机器人,它可以利用紫外线光和磁力在任何表面上移动,包括墙壁和天花板。

新加坡科技设计大学(SUTD)仿生机器人与设计实验室的研究人员开发出一款新型可重新配置的工作空间软体(RWS)机器人抓手,可以铲取、抓取和拾取各种消费物品。

康奈尔大学的工程师们创造了一种软体机器人,它能够在检测到损伤或受伤后进行自我修复。该团队由康奈尔大学康奈尔工程学院机械和航空航天工程副教授 Rob Shepherd 领导,他们想要制造一种机器人,该机器人可以使用光学传感器和复合材料检测损伤。他们将传感器和材料结合起来开发了自愈软体机器人。
具备攀爬能力的微型机器人由于其微小的身躯,可以代替人类进入复杂、非结构化环境中执行特殊任务,在探测、生医等方面有着巨大应用价值。由软材料组成的类肌肉软驱动器可以为机器人提供极佳的灵活性、适应性和机械鲁棒性,相应的微型软体攀爬机器人也得到了研究者的广泛关注。然而,如何实现微型软体攀爬机器人在多种形貌表面上攀爬,甚至在两种不同表面之间过渡,仍然存在巨大挑战。

据科技日报报道,在据最新一期《科学进展》杂志,美国北卡罗来纳州立大学的研究人员开发出了一种节能的软体机器人,它的游泳速度比以前的游泳软体机器人快4倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于人类蝶泳时手臂的动作。

美国明尼苏达大学双城分校的研究人员受到植物和真菌生长方式的启发,开发出一种新型挤出式制造方法,可实现合成材料的生长,能够使软体机器人像植物一样“生长”。
美国康奈尔大学和美国陆军研究实验室的研究人员开发出一种利用流体动力和磁力来驱动的橡胶状、可变形的泵,可以为软体机器人提供循环系统,类似于生物的心脏和动脉。
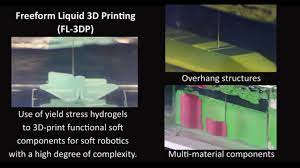
新加坡科技与设计大学(SUTD)的研究人员开发了一种新方法,采用自由形式液体3D打印(FL-3DP)技术制造软体机器人复杂功能组件。

4月1日,香港中文大学的研究团队公布了一项最新研究成果——“机器人史莱姆”。由于公布的时间比较特殊,团队中的香港中文大学教授张丽强调,尽管它的发布时间是4月1日,但这是真正的科学研究,而不是愚人节的玩笑。据BBC报道,这是一种由含有磁性颗粒的黏液制成的软体机器人,它可以使用外部磁铁进行操纵。

