
水母游泳方式启发水下航行器设计
双小水母是一种与水母有亲缘关系的海洋动物,它身上十多个甚至更多的柔软结构向后泵水,通过脉冲喷射推动其前进。它可以单独控制这些结构:要么同步控制,要么按顺序依次“启动”。美国俄勒冈大学的一个研究小组发现,这两种不同的游泳方式可以让水母按需优先考虑速度或能量效率。这一发现可能会为水下航行器的设计提供参考,帮助科学家建造更强大的航行器。


双小水母是一种与水母有亲缘关系的海洋动物,它身上十多个甚至更多的柔软结构向后泵水,通过脉冲喷射推动其前进。它可以单独控制这些结构:要么同步控制,要么按顺序依次“启动”。美国俄勒冈大学的一个研究小组发现,这两种不同的游泳方式可以让水母按需优先考虑速度或能量效率。这一发现可能会为水下航行器的设计提供参考,帮助科学家建造更强大的航行器。
Anduril和澳大利亚皇家海军将合作开发超大型自主水下航行器,Anduril Industries为一家美国国防科技独角兽公司,今年(2022年)宣布进军澳大利亚,先前Anduril Industries已与美国国防部合作,最近更与美军特战司令部和英国国防部达成了共约10 亿美元的协议。
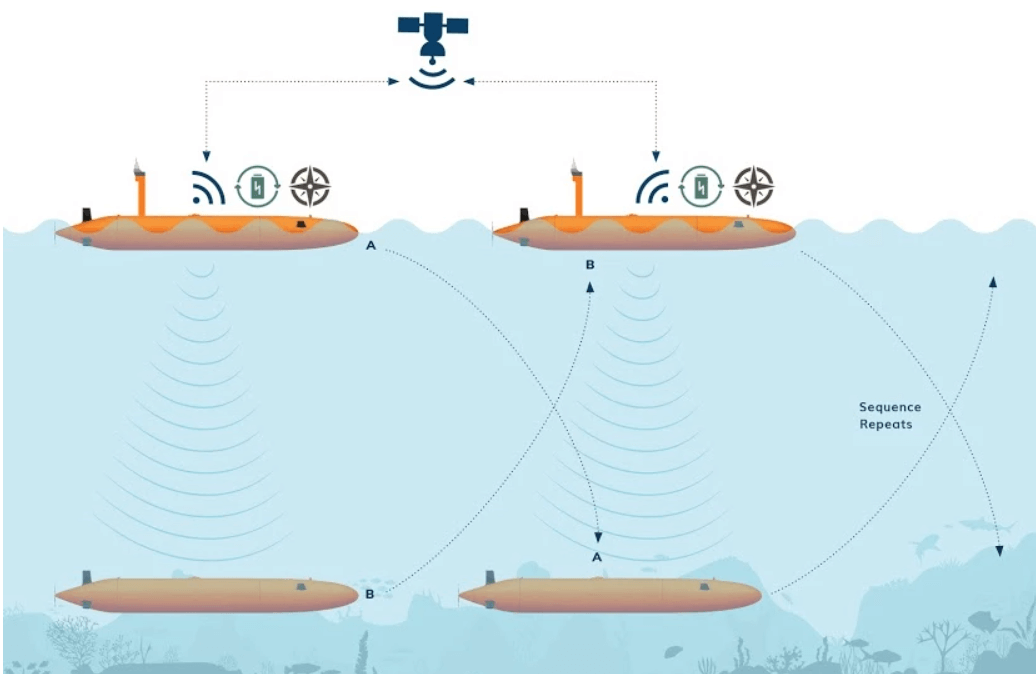
虽然AUV(自主水下航行器)擅长在没有人类干预的情况下收集海洋数据,但它们仍然受到电池寿命的限制。德克萨斯州的初创公司Terradepth已经开始着手解决这个问题,他们推出了一种新型的标签团队系统。
欠驱动水面舰艇已在多个领域应用广泛,可开展水面侦查、巡逻、监控以及搜救等任务。欠驱动水面舰艇模型所具有的多变量、非线性及欠驱动特性,导致常规的连续状态反馈方法无法使系统镇定,这为控制器设计增大了难度。

机器人可以成为搜救任务和环境研究的绝佳工具,但最终他们必须回到基地为电池充电并上传数据。如果机器人是在深海中探索的自动水下航行器(AUV),那将是一个挑战。现在,普渡大学的一个团队已经为AUV水下机器人创建了一个移动对接系统,使他们能够执行更长的任务而无需人工干预。
