
新型可重新配置的工作空间软体机器人抓手
新加坡科技设计大学(SUTD)仿生机器人与设计实验室的研究人员开发出一款新型可重新配置的工作空间软体(RWS)机器人抓手,可以铲取、抓取和拾取各种消费物品。


新加坡科技设计大学(SUTD)仿生机器人与设计实验室的研究人员开发出一款新型可重新配置的工作空间软体(RWS)机器人抓手,可以铲取、抓取和拾取各种消费物品。

当今的大多数机器人抓手依靠嵌入式传感器、复杂的反馈回路或先进的机器学习算法,结合操作员的技能,来抓取易碎或形状不规则的物体。美国哈佛大学工程与应用科学学院研究人员从大自然中汲取灵感,设计了一种新型柔软的机器人抓手。它使用一组细长的触手来缠绕和诱捕物体,类似于水母捕获猎物的方式。该研究近日发表在《美国国家科学院院刊》上。
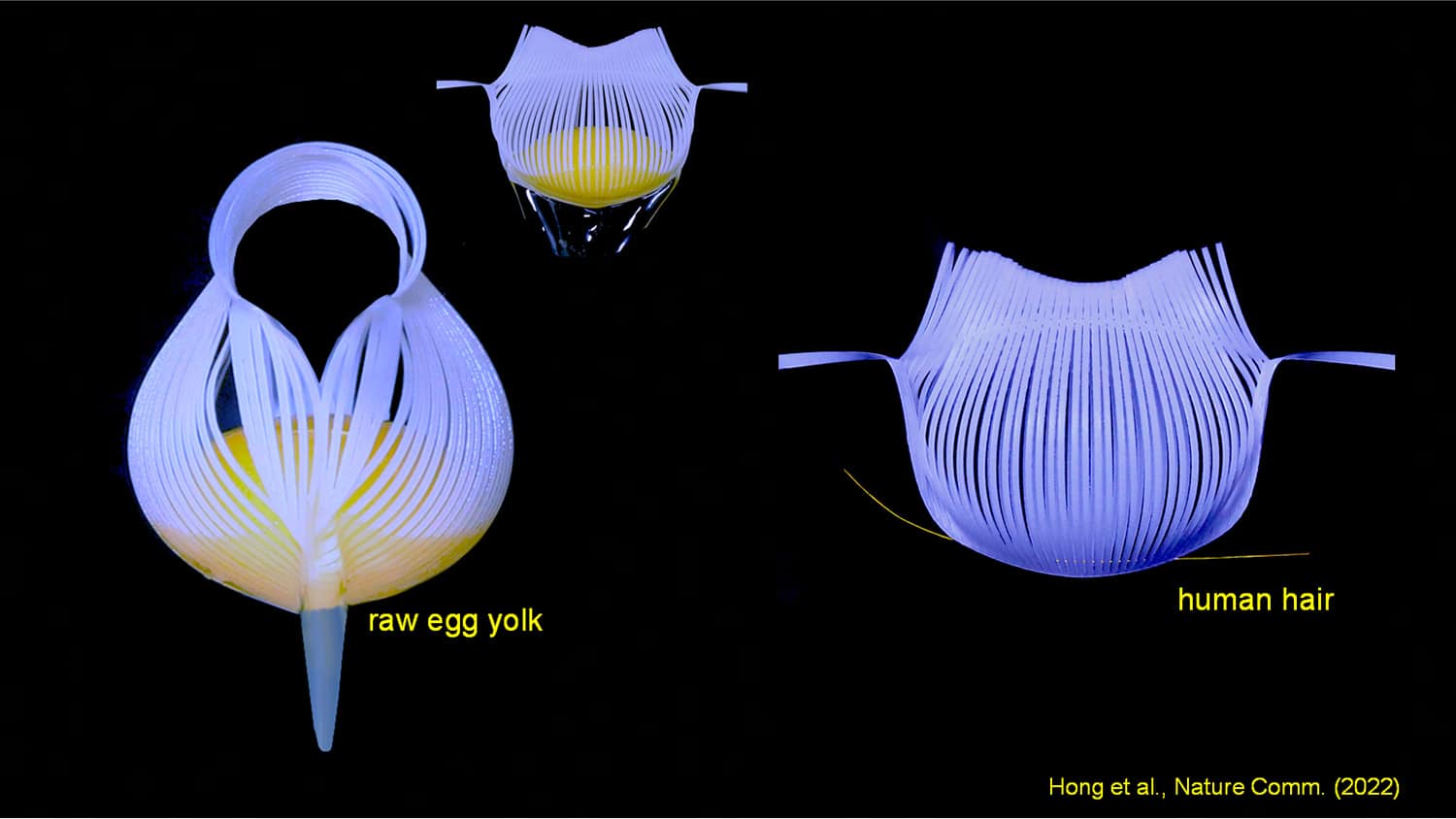
据最新一期《自然·通讯》杂志报道,美国北卡罗来纳州立大学工程研究人员展示了一种新型机器人抓手,它极其灵活精确,能够提起柔弱的蛋黄而不破坏它,且其精确度足以举起一根头发。这一成果适用于柔性机器人和生物医学技术。
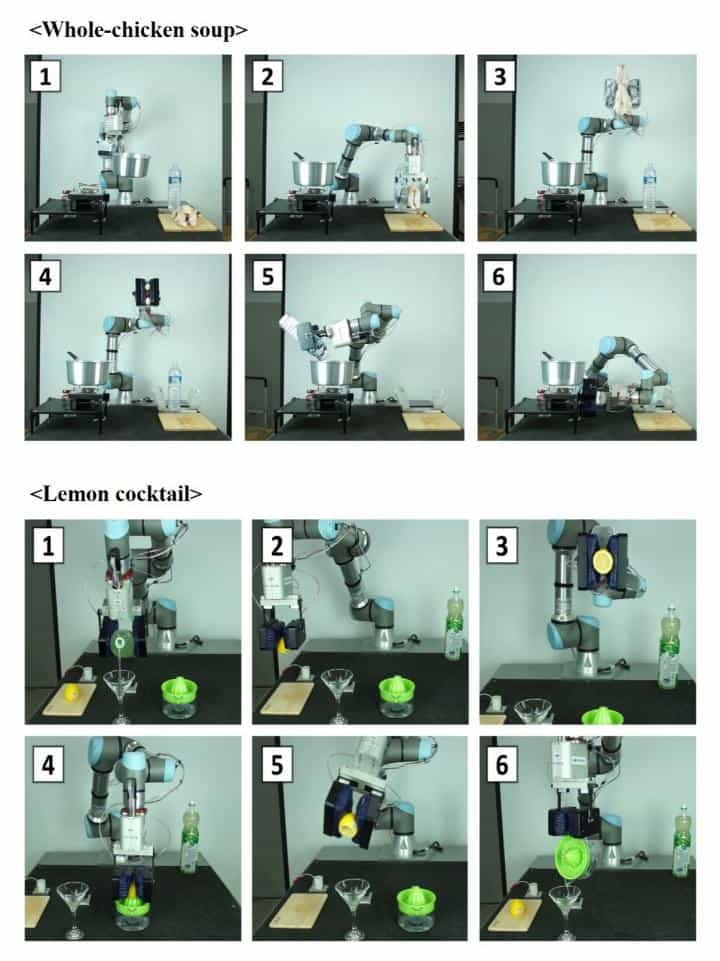
韩国机械与材料研究所(KIMM)成功开发出全能夹持器技术,使机器人能够夹持各种形状和硬度的物体。利用新技术,一个抓手就可以处理不同的物体,如螺丝刀、灯泡、咖啡壶等,甚至可以处理豆腐、草莓、生鸡肉等表面柔软的食物。预计将在家务、烹饪、服务、包装、制造等非接触服务领域扩大应用。
