



芬兰坦佩雷大学和美国匹兹堡大学的研究人员开发了一种微型机器人,这种机器人模仿了枫树种子在空中旋转下落的舞蹈。未来,这种机器人可以用于实时环境监测或在难以到达的地形如沙漠、山脉、悬崖或海洋中传递小样本。这项技术可能会在搜救、濒危物种研究或基础设施监测等领域带来革命性变化。
加州大学圣地亚哥分校的研究人员开发了一种由藻类制成的微型机器人,可以在不使用药物的情况下治疗炎症性肠病(IBD)。这种微型机器人被设计成液体胶囊形式,通过外部磁场可以精确定位到身体内的特定部位。
在机器人技术领域,微型化一直是一个重要的研究方向。随着科技的进步,科学家们不断探索如何将机器人做得更小、更轻、更快。近日,科学家们在这一领域取得了显著成果,他们开发出了的微型机器人不仅体积小巧,而且功能齐全,成为了目前已知的最小、最轻、速度最快的全功能微型机器人。
全球每年有四分之一的人死于血栓引起的疾病。血栓会阻塞血管并阻止氧气输送到身体各个部位。虽然外科医生可以使用灵活的器械消除血栓,从而恢复血液流动,但是某些身体区域很难到达。现在,微型机器人可以克服这些限制,从难以到达的血管中去除血栓。

携带传感器的小型移动机器人可以执行诸如捕捉气体泄漏或跟踪仓库库存等任务。但是移动机器人需要大量能量,而典型的电池作为电源限制了使用寿命并引发环境问题。研究人员已经探索了各种替代方案:将传感器固定在昆虫身上,在附近放置充电垫,或者用激光为机器人供电。每种方法都有缺点。昆虫会四处漫游,充电设备限制了范围,激光可能会伤害人眼。

一项新研究发布在了最新一期的《科学·机器人》杂志上,由美国华盛顿大学的研究人员完成。他们开发了一种非常小的机器人设备,可以在空中飞行时通过折叠的形式改变其飞行方式。这个微型飞行器只有大约400毫克重,差不多是半颗钉子的重量。当从40米的高度丢下时,它可以飘行超过一个足球场的长度。

直径仅为两毫米的微型医疗机器人可以改变未来的肺癌诊断。这个手术机器人由利兹大学的一个多学科团队设计,可以深入肺部,以“检测和治疗癌症的最初迹象”。
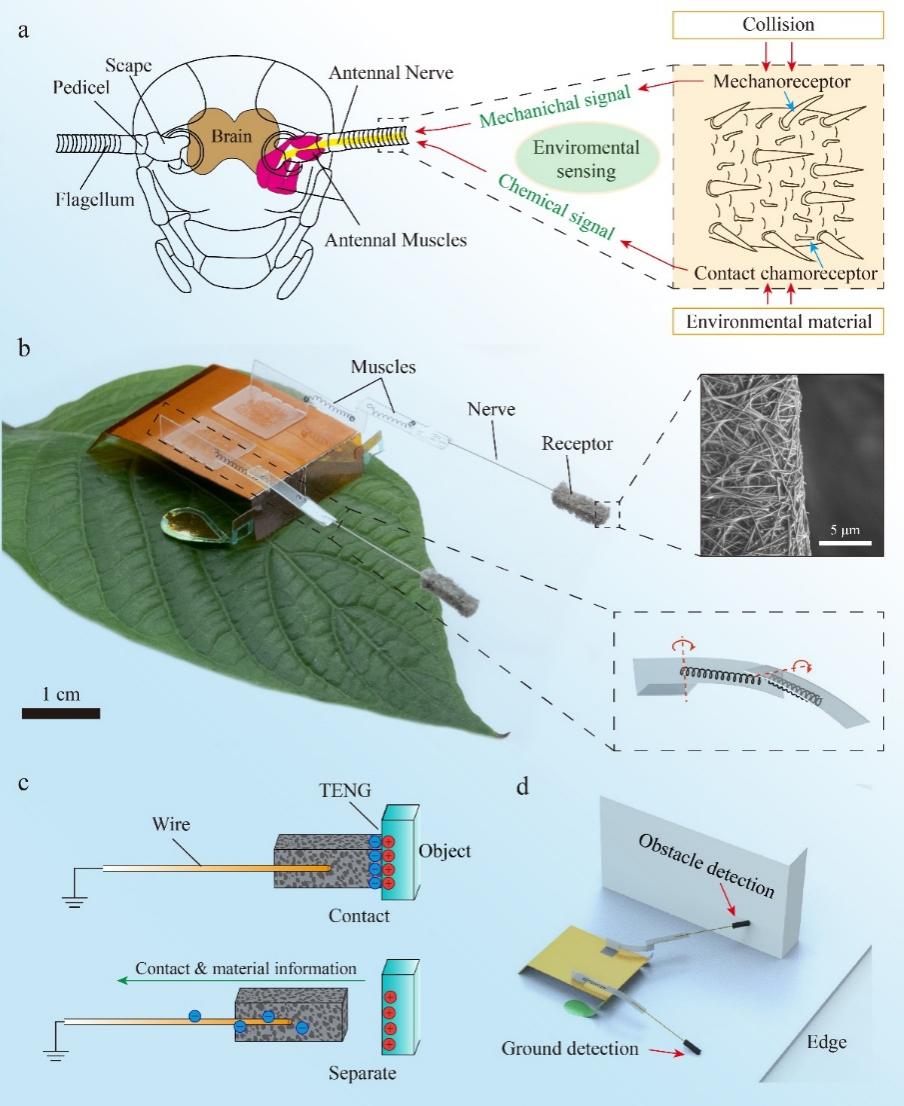
柔性微型机器人在体积、重量上都远小于传统的刚性机器人,可以胜任诸如狭小地形探测、灾害救援等很多大型机器人难以完成的工作。但是在触觉感知能力上,微型机器人由于带负载能力弱、尺寸小,其通常无法直接搭载商用传感器和应用传统感知解决方案来获得感知能力,必须通过与微型机器人的结构与功能相匹配的特殊设计,定制微型机器人的传感器。因此如何在微型机器人驱动力弱、功率密度低、结构尺寸小的限制下实现机器人对外界环境的触觉感知,对赋予微型机器人实用化和智能化具有重要意义。
英国《自然·通讯》杂志20日发表的一篇工程学论文,描述了一种受穿山甲启发研制的微型机器人,该机器人被设计用于在人体内进行安全和微创的医学治疗。在未来应用中,这一无系留软体机器人能够通过变形,到达人体内难以触及的区域,如胃或小肠内。


以色列特拉维夫大学和以色列理工学院的研究人员合作开发了一种混合微型机器人,其大小相当于单个生物细胞(直径约10微米),可使用电和磁两种不同的机制进行控制和导航。微型机器人能在生物样本中的不同细胞之间导航,区分不同类型的细胞,识别它们是健康的还是垂死的,然后运输所需的细胞进行遗传分析等进一步研究。该研究发表在新一期《先进科学》杂志上。
美国加州大学圣地亚哥分校的研究人员开发出可在肺部游泳并运送药物的微型机器人,可治疗胃和血液中的细菌感染,如细菌性肺炎等。该机器人由海藻细胞制成,表面布满含有抗生素的纳米颗粒。

超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家展开研究,探索这一特性在相关领域的应用前景,例如细胞操作、净化水源等。然而,目前大部分对于超疏水微型机器人的研究均是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到限制。
