新机制提升柔性设备性能:柔性机器人和微型胶囊的未来
在5月15日发表在《物理评论快报》上的一项新研究中,弗吉尼亚理工大学的研究团队揭示了一种新的微观现象,这种现象有望极大地提高软设备的性能。这些柔性设备包括敏捷的柔性机器人和用于药物输送的微型胶囊。


在5月15日发表在《物理评论快报》上的一项新研究中,弗吉尼亚理工大学的研究团队揭示了一种新的微观现象,这种现象有望极大地提高软设备的性能。这些柔性设备包括敏捷的柔性机器人和用于药物输送的微型胶囊。

在我们不断追求科技发展和创新的过程中,研究人员正在突破传统电子产品的界限,将科幻电影中的场景变成现实。他们开发出了一种创新的可拉伸柔性电子设备,这种设备可以检测来自皮肤、肌肉和器官的生物电信号,这些信号可控制机器人。这项技术的出现,无疑将为我们的生活带来巨大的变革。
美国达特茅斯研究人员开发出一种由柔软模块构成的柔性机器人。这些模块可以协同工作,创造出能够承受重量、滚动、行走、抓握物体和运输负载的多功能结构。
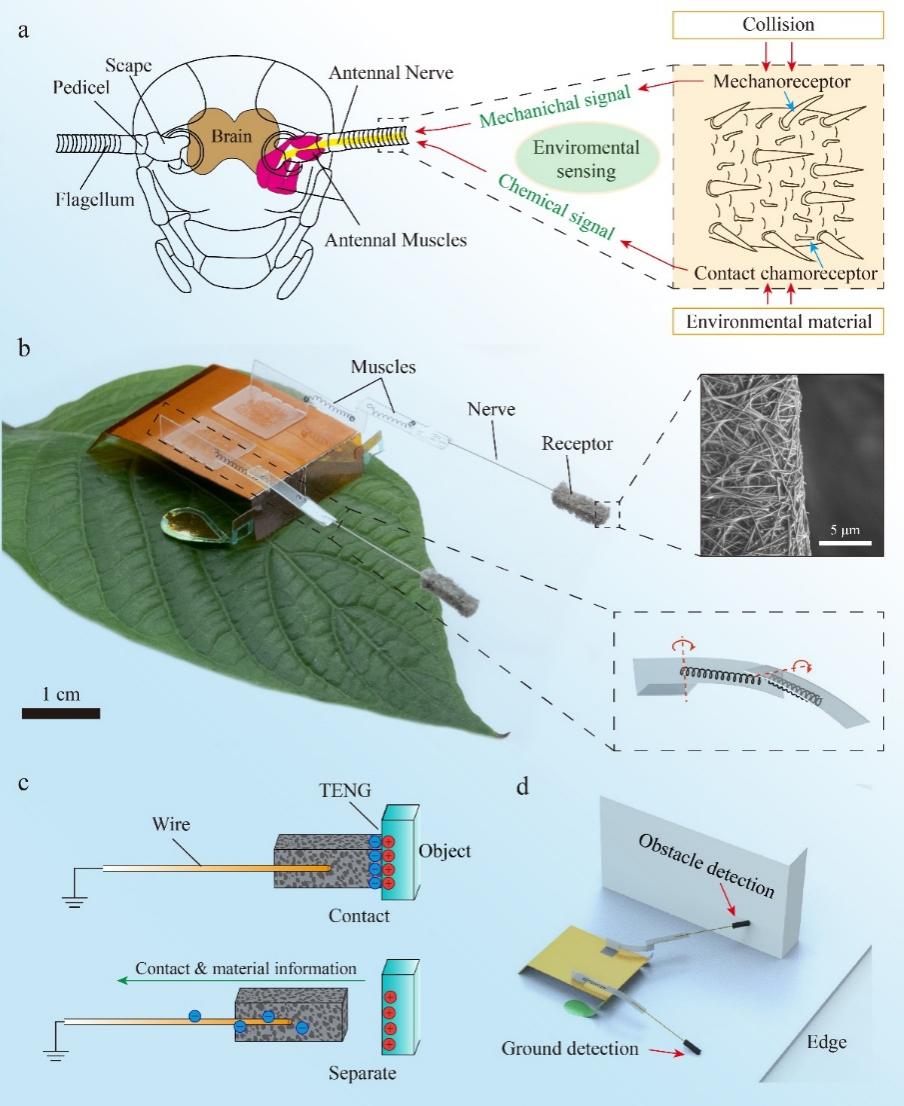
柔性微型机器人在体积、重量上都远小于传统的刚性机器人,可以胜任诸如狭小地形探测、灾害救援等很多大型机器人难以完成的工作。但是在触觉感知能力上,微型机器人由于带负载能力弱、尺寸小,其通常无法直接搭载商用传感器和应用传统感知解决方案来获得感知能力,必须通过与微型机器人的结构与功能相匹配的特殊设计,定制微型机器人的传感器。因此如何在微型机器人驱动力弱、功率密度低、结构尺寸小的限制下实现机器人对外界环境的触觉感知,对赋予微型机器人实用化和智能化具有重要意义。

上海交大王皓、陈根良团队提出构建高性能气动柔性机器人新方法,该机器人单元同时具备结构顺应性、交互友好性以及承载强、质量轻、精度高、工作空间大等优点,将刚性与柔性机器人各自的优点有机结合。
爱丁堡大学的科学家团队研发了智能电子皮肤,为具有触感的柔性机器人装置铺平了道路。研究人员称:“他们的可拉伸电子皮肤首次让机器人具有了与人类和动物类似的物理自我意识。”

澳大利亚工程师开发了一种微型柔性软体机器人手臂,可将生物材料直接3D打印到人体器官上。未来医生们有望通过小的皮肤切口或天然小孔,将该设备送入人体内难以触及的区域,以加速疾病的治愈。相关研究刊发于最新一期《先进材料》杂志。
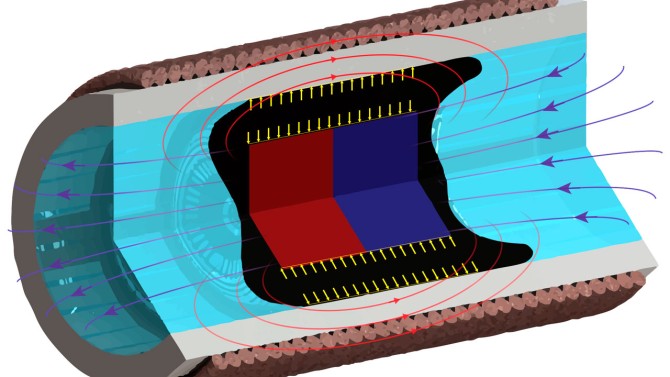
美国康奈尔大学和美国陆军实验室合作研究,运用流体动力和磁力驱动一个弹性、可变形的泵,提供柔性机器人循环系统的动力,研究成果已发表在美国国家科学院院刊(PNAS)上。

近日,中国科学院理化技术研究所液态金属与低温生物研究中心提出并证实了一种新型的基于液态金属液滴实现的柔性逻辑门器件(AND、OR、NOT、NAND、NOR)、计算单元并由此控制全柔性机器的理论与技术途径,可望改观传统的柔性或刚体智能器件
加州大学圣地亚哥分校的机器人专家们开发出了一种经济实惠、易于使用的系统,用于跟踪柔性医疗机器人在人体内的位置。该系统的性能与目前最先进的方法不相上下,但成本更低。目前的许多方法还需要暴露在辐射下,而这个系统不需要。
加州大学洛杉矶分校(UCLA)和卡内基梅隆大学的合作者们首次将这一复杂的计算机图形技术改编成模拟柔性机器人的动作。该研究已经实现了比实时仿真更快的柔性机器人,这是向着这种机器人的自主性和能够自主规划动作的机器人迈出了一大步
