

沿整个手指提供连续感应机械手只需一次抓握即可识别物体
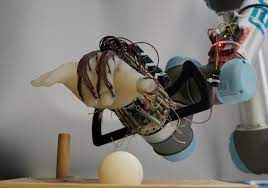
受人类手指的启发,美国麻省理工学院研究人员开发了一种机器人手,它使用高分辨率的触摸感应在抓取物体一次后即可准确识别物体。这项研究在3日至7日于新加坡举行的RoboSoft会议上发表。

工程师设计开发一种新颖类人机械手,更精确地模拟人类动作
据外媒报道,一般来说,机械手各不相同,有的是抓得很牢的刚性设备,有的是更能抓住柔性的小工具。然而现在,科学家们创造了一种附属物,他们声称这种附属物结合了两者的最佳功能。当涉及到拿起沉重、坚固的物体时,机器人通常会利用两指的抓手。由于其刚性设计,这些并没有特别温柔的触感,但它们可以施加很大的力量。而顺应性较强柔性机械手则通常用于搬运易碎物品。这类机械手不太容易打碎东西,但也不会有特别牢固的抓地力。
