

让自动驾驶“脑补”感知!中国团队模拟人脑联想感知机制提出三维目标检测通用框架
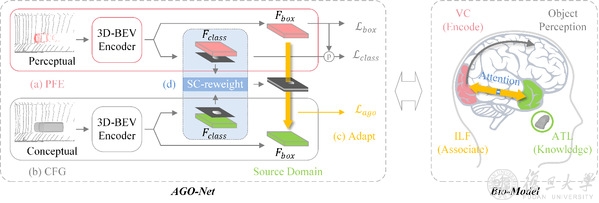
基于激光雷达的三维目标检测技术是机器人和自动驾驶领域最重要的模式识别任务之一。如何针对点云的稀疏性和不规则性设计鲁棒的特征表达,从而提升检测精度,是目前亟待解决的关键难题。复旦大学类脑智能科学与技术研究院冯建峰教授团队联合百度视觉技术团队和南京一汽自动驾驶团队,提出了一种基于人脑联想感知机制的三维目标检测通用框架
