既会跑又会游 水陆两栖机器人再升级
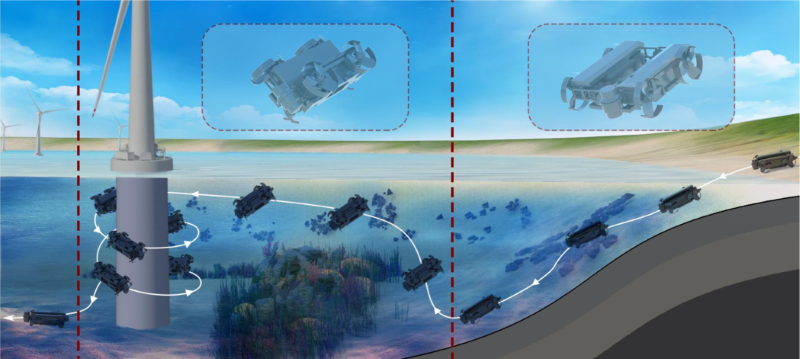
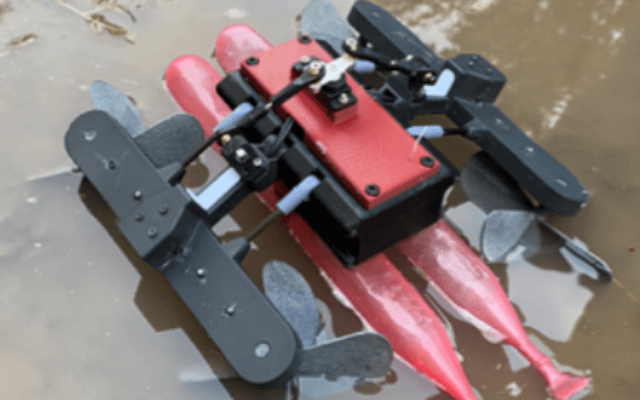
凭借足桨可变型关节和多模态驱动,机器人可在沙滩和水下智能切换奔跑模式和游动模式。这就是哈尔滨工程大学王刚副教授科研团队的最新研究成果——足桨式多模态水陆两栖机器人。这款水陆两栖机器人解决了机器人难以在浅滩环境中敏捷游动和快速奔跑的业界难题。


凭借足桨可变型关节和多模态驱动,机器人可在沙滩和水下智能切换奔跑模式和游动模式。这就是哈尔滨工程大学王刚副教授科研团队的最新研究成果——足桨式多模态水陆两栖机器人。这款水陆两栖机器人解决了机器人难以在浅滩环境中敏捷游动和快速奔跑的业界难题。
以色列本古里安大学研究人员近日表示,在对蟑螂和蜥蜴运动进行研究之后,他们研发出一种可应对复杂地理环境、新型手掌大小的高速两栖机器人,能游泳、水上跑步以及地面爬行。
